Disclaimer: This post has been translated to English using a machine translation model. Please, let me know if you find any mistakes.
Paper
Florence-2: Advancing a Unified Representation for a Variety of Vision Tasks is the Florence-2 paper.
Summary of the paper
Florence-2 is a vision foundation model with a unified representation, it is prompt-based for a variety of vision and vision-language tasks.
Existing large vision models are good at transfer learning, but they struggle to perform a variety of tasks with simple instructions. Florence-2 was designed to take text prompts as task instructions and generate results in the form of text, object detection, grounding (relating natural language words or phrases to specific regions of an image), or segmentation.
To train the model, they created the FLD-5B dataset, which has 5.4 billion complete visual annotations in 126 million images. This dataset was processed by two efficient processing modules.
The first module uses specialized models to collaboratively and autonomously annotate images, instead of the single and manual annotation method. Multiple models work together to reach a consensus, reminiscent of the concept of the wisdom of crowds, ensuring a more reliable and impartial understanding of the image.The second module iteratively refines and filters these automated annotations using well-trained fundamental models.
The model is capable of performing a variety of tasks, such as object detection, captioning, and grounding, all within a single model. Task activation is achieved through text prompts.
To develop a versatile basic vision model. To this end, the model's training method incorporates three distinct learning objectives, each addressing a different level of granularity and semantic understanding:
- Image-level understanding tasks capture high-level semantics and promote a comprehensive understanding of images through linguistic descriptions. They allow the model to understand the overall context of an image and capture semantic relationships and contextual nuances in the language domain. Exemplary tasks include image classification, captioning, and visual question answering.
- Region/pixel-level recognition tasks facilitate the detailed localization of objects and entities within images, capturing the relationships between objects and their spatial context. Tasks include object detection, segmentation, and understanding referential expressions.
- Fine-grained visual-semantic alignment tasks require a fine-grained understanding of both the text and the image. It involves locating the regions of the image that correspond to text phrases, such as objects, attributes, or relationships. These tasks challenge the ability to capture the local details of visual entities and their semantic contexts, as well as the interactions between textual and visual elements.
By combining these three learning objectives into a multi-task learning framework, the model learns to handle different levels of detail and semantic understanding.
Architecture
The model employs a sequence-to-sequence (seq2seq) architecture, which integrates an image encoder and a multimodal encoder-decoder.
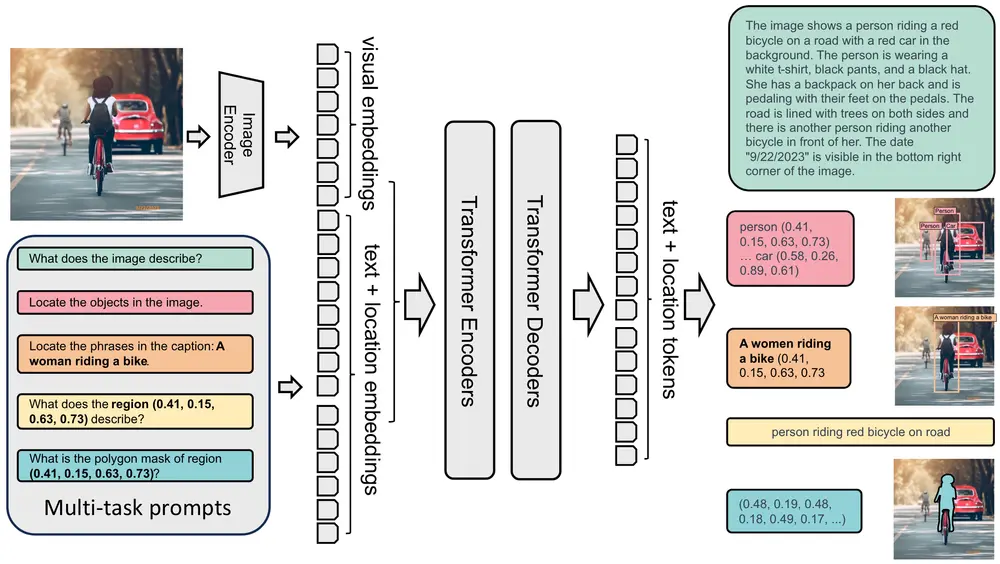
As the model receives images and prompts, it has an image encoder to obtain the embeddings of the image. On the other hand, the prompts are passed through a tokenizer and text and location embedding. The embeddings of the image and the prompt are concatenated and passed through a transformer to obtain the output text tokens and location in the image. Finally, it goes through a text and location decoder to get the results.
The text encoder-decoder (transformer) plus the positions is called a multimodal encoder-decoder.
By extending the tokenizer's vocabulary to include location tokens, it allows the model to process object region-specific information in a unified learning format, that is, through a single model. This eliminates the need to design specific heads for different tasks and enables a more data-focused approach.
They created 2 models, Florence-2 Base and Florence-2 Large. Florence-2 Base has 232B parameters and Florence-2 Large has 771B parameters. Each one has these sizes
| Model | Image Encoder (DaViT) | Image Encoder (DaViT) | Image Encoder (DaViT) | Image Encoder (DaViT) | Encoder-Decoder (Transformer) | Encoder-Decoder (Transformer) | Encoder-Decoder (Transformer) | Encoder-Decoder (Transformer) |
|---|---|---|---|---|---|---|---|---|
| dimensions | blocks | heads/groups | #params | encoder layers | decoder layers | dimensions | #params | |
| Florence-2-B | [128, 256, 512, 1024] | [1, 1, 9, 1] | [4, 8, 16, 32] | 90M | 6 | 6 | 768 | 140M |
| Florence-2-L | [256, 512, 1024, 2048] | [1, 1, 9, 1] | [8, 16, 32, 64] | 360M | 12 | 12 | 1024 | 410M |
Vision Encoder
They used DaViT as the vision encoder. It processes an input image into flattened visual embeddings (Nv×Dv), where Nv and Dv represent the number of embeddings and the dimension of the visual embeddings, respectively.
Multimodal Encoder-Decoder
They used a standard transformer architecture to process the visual and language embeddings.
Optimization Objective
Given an input x (combination of the image and the prompt), and the target y, they used standard language modeling with cross-entropy loss for all tasks.
Dataset
They created the FLD-5B dataset, which includes 126 million images, 500 million text annotations, 1.3 billion text-region annotations, and 3.6 billion text-phrase-region annotations across different tasks.
Collection of the images
To collect the images, they used images from the ImageNet-22k, Object 365, Open Images, Conceptual Captions, and LAION datasets.
Image Tagging
The main goal is to generate annotations that can effectively serve for multi-task learning. To this end, they created three categories of annotations: text, text-region pairs, and text-phrase-region triplets.
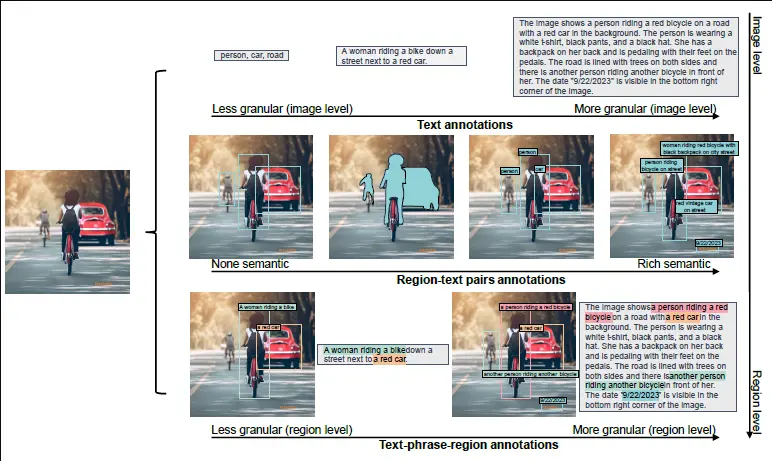
The data annotation workflow consists of three phases: (1) initial annotation using specialized models, (2) data filtering to correct errors and remove irrelevant annotations, and (3) an iterative process for data refinement.
- Initial Annotation with Specialized Models. They used synthetic labels obtained from specialized models. These specialized models are a combination of offline models trained on a variety of publicly available datasets and online services hosted on cloud platforms. They are specifically designed to excel in annotating their respective types of annotations. Some image datasets contain partial annotations. For example, Object 365 already includes bounding boxes annotated by humans and the corresponding categories as text-region annotations. In those cases, they merged the pre-existing annotations with the synthetic labels generated by the specialized models.
- Data Filtering and Enhancement. The initial annotations obtained from specialized models are susceptible to noise and inaccuracy. Therefore, they implemented a filtering process. It primarily focuses on two types of data in the annotations: text data and region data. Regarding textual annotations, they developed an analysis tool based on SpaCy to extract objects, attributes, and actions. They filtered out texts containing excessive objects, as these tend to introduce noise and may not accurately reflect the actual content in the images. Additionally, they evaluated the complexity of actions and objects by measuring their node degree in the dependency parse tree. They retained texts with a certain minimum complexity to ensure the richness of visual concepts in the images. In relation to region annotations, they removed noisy boxes below a confidence score threshold. They also employed non-max suppression to reduce redundant or overlapping bounding boxes.
- Iterative data refinement. Using the filtered initial annotations, they trained a multitask model that processes sequences of data.
Training
- For the training, they used AdamW as the optimizer, which is a variant of Adam that includes L2 regularization on the weights.
- They used a cosine decay for the learning rate. The maximum learning rate value was set to 1e-4 and a linear warmup of 5000 steps.
- They used [Deep-Speed] and mixed precision to accelerate the training.* They used a batch size of 2048 for Florence-2 Base and 3072 for Florence-2 Large.
- They conducted an initial training with images of size 184x184 using all the images in the dataset, followed by a resolution adjustment with images of 768x768 using 500 million images for the base model and 100 million images for the large model.
Results
Zero-shot Evaluation
For zero-shot tasks they obtained these results
| Method | #params | COCO Cap. | COCO Cap. | NoCaps | TextCaps | COCO Det. | Flickr30k | Refcoco | Refcoco+ | Refcocog | Refcoco RES |
|---|---|---|---|---|---|---|---|---|---|---|---|
| test | val | val | val | val2017 | test | test-A | test-B | val | test-A | ||
| CIDEr | CIDEr | CIDEr | CIDEr | mAP | R@1 | Accuracy | Accuracy | Accuracy | mIoU | ||
| Flamingo [2] | 80B | 84.3 | - | - | - | - | - | - | - | - | - |
| Florence-2-B | 0.23B | 133.0 | 118.7 | 70.1 | 34.7 | 34.7 | 83.6 | 53.9 | 58.4 | 49.7 | 51.5 |
| Florence-2-L | 0.77B | 135.6 | 120.8 | 72.8 | 37.5 | 37.5 | 84.4 | 56.3 | 61.6 | 51.4 | 53.6 |
As can be seen, Florence-2, both the base and the large, outperform models one or two orders of magnitude larger.
Generalist model with public supervised data
They fine-tuned the Florence-2 models by adding a collection of public datasets that cover image-level, region-level, and pixel-level tasks. The results can be seen in the following tables.
Performance in captioning and VQA tasks:
| Method | #params | COCO Caption | NoCaps | TextCaps | VQAv2 | TextVQA | VizWiz VQA |
|---|---|---|---|---|---|---|---|
| Karpathy test | val | val | test-dev | test-dev | test-dev | ||
| CIDEr | CIDEr | CIDEr | Acc | Acc | Acc | ||
| **Specialist Models** | |||||||
| CoCa [92] | 2.1B | 143.6 | 122.4 | - | 82.3 | - | - |
| BLIP-2 [44] | 7.8B | 144.5 | 121.6 | - | 82.2 | - | - |
| GIT2 [78] | 5.1B | 145 | 126.9 | 148.6 | 81.7 | 67.3 | 71.0 |
| Flamingo [2] | 80B | 138.1 | - | - | 82.0 | 54.1 | 65.7 |
| PaLI [15] | 17B | 149.1 | **127.0** | 160.0 | 84.3 | 58.8 / 73.1△ | 71.6 / 74.4△ |
| PaLI-X [12] | 55B | **149.2** | 126.3 | **147 / 163.7** | **86.0** | **71.4 / 80.8△** | **70.9 / 74.6△** |
| **Generalist Models** | |||||||
| Unified-IO [55] | 2.9B | - | 100 | - | 77.9 | - | 57.4 |
| Florence-2-B | 0.23B | 140.0 | 116.7 | 143.9 | 79.7 | 63.6 | 63.6 |
| Florence-2-L | 0.77B | 143.3 | 124.9 | 151.1 | 81.7 | 73.5 | 72.6 |
△ Indicates that external OCR was used as input
Performance in region and pixel-level tasks:
| Method | #params | COCO Det. | Flickr30k | Refcoco | Refcoco+ | Refcocog | Refcoco RES |
|---|---|---|---|---|---|---|---|
| val2017 | test | test-A | test-B | val | test-A | ||
| mAP | R@1 | Accuracy | Accuracy | Accuracy | mIoU | ||
| **Specialist Models** | |||||||
| SeqTR [99] | - | - | - | 83.7 | 86.5 | 81.2 | 71.5 |
| PolyFormer [49] | - | - | - | 90.4 | 92.9 | 87.2 | 85.0 |
| UNINEXT [84] | 0.74B | **60.6** | - | 92.6 | 94.3 | 91.5 | 85.2 |
| Ferret [90] | 13B | - | - | 89.5 | 92.4 | 84.4 | 82.8 |
| **Generalist Models** | |||||||
| UniTAB [88] | - | - | **88.6** | 91.1 | 83.8 | 81.0 | 85.4 |
| Florence-2-B | 0.23B | 41.4 | 84.0 | 92.6 | 94.8 | 91.5 | 86.8 |
| Florence-2-L | 0.77B | 43.4 | 85.2 | **93.4** | **95.3** | **92.0** | **88.3** |
Results of COCO object detection and instance segmentation
| Backbone | Pretrain | Mask R-CNN | Mask R-CNN | DINO |
|---|---|---|---|---|
| APb | APm | AP | ||
| ViT-B | MAE, IN-1k | 51.6 | 45.9 | 55.0 |
| Swin-B | Sup IN-1k | 50.2 | - | 53.4 |
| Swin-B | SimMIM [83] | 52.3 | - | - |
| FocalAtt-B | Sup IN-1k | 49.0 | 43.7 | - |
| FocalNet-B | Sup IN-1k | 49.8 | 44.1 | 54.4 |
| ConvNeXt v1-B | Sup IN-1k | 50.3 | 44.9 | 52.6 |
| ConvNeXt v2-B | Sup IN-1k | 51.0 | 45.6 | - |
| ConvNeXt v2-B | FCMAE | 52.9 | 46.6 | - |
| DaViT-B | Florence-2 | **53.6** | **46.4** | **59.2** |
Object Detection COCO using Mask R-CNN and DINO
| Pretrain | Frozen stages | Mask R-CNN | Mask R-CNN | DINO | UperNet |
|---|---|---|---|---|---|
| APb | APm | AP | mloU | ||
| Sup IN1k | n/a | 46.7 | 42.0 | 53.7 | 49 |
| UniCL [87] | n/a | 50.4 | 45.0 | 57.3 | 53.6 |
| Florence-2 | n/a | **53.6** | **46.4** | **59.2** | **54.9** |
| Florence-2 | [1] | **53.6** | 46.3 | **59.2** | 54.1 |
| Florence-2 | [1, 2] | 53.3 | 46.1 | 59.0 | 54.4 |
| Florence-2 | [1, 2, 3] | 49.5 | 42.9 | 56.7 | 49.6 |
| Florence-2 | [1, 2, 3, 4] | 48.3 | 44.5 | 56.1 | 45.9 |
ADE20K Semantic Segmentation Results
| Backbone | Pretrain | mIoU | ms-mIoU |
|---|---|---|---|
| ViT-B [24] | Sup IN-1k | 47.4 | - |
| ViT-B [24] | MAE IN-1k | 48.1 | - |
| ViT-B [4] | BEiT | 53.6 | 54.1 |
| ViT-B [59] | BEiTv2 IN-1k | 53.1 | - |
| ViT-B [59] | BEiTv2 IN-22k | 53.5 | - |
| Swin-B [51] | Sup IN-1k | 48.1 | 49.7 |
| Swin-B [51] | SimMIM [83] | - | 52.8 |
| FocalAtt-B [86] | Sup IN-1k | 49.0 | 50.5 |
| FocalNet-B [85] | Sup IN-1k | 50.5 | 51.4 |
| ConvNeXt v1-B [52] | Sup IN-1k | - | 49.9 |
| ConvNeXt v2-B [81] | Sup IN-1k | - | 50.5 |
| ConvNeXt v2-B [81] | FCMAE | - | 52.1 |
| DaViT-B [20] | Florence-2 | **54.9** | **55.5** |
It can be seen how Florence-2 is not the best in some of the tasks, although it is in others, but it stands at the level of the best models for each task, having one or two orders of magnitude fewer parameters than the other models.
Available models
In the collection of Florence-2 models by Microsoft on Hugging Face, you can find the models Florence-2-large, Florence-2-base, Florence-2-large-ft and Florence-2-base-ft.
We have already seen the difference between large and base, large is a model with 771B parameters and base has 232B parameters. The models with -ft are the models that have been fine-tuned on some tasks.
Tasks defined by the prompt
As we have seen, Florence-2 is a model that takes an image and a prompt as input, so the model will perform one task or another based on the prompt. The following are the prompts that can be used for each task.
| Task | Annotation Type | Prompt Input | Output |
|---|---|---|---|
| Caption | Text | Image, text | Text |
| Detailed caption | Text | Image, text | Text |
| More detailed caption | Text | Image, text | Text |
| Region proposal | Region | Image, text | Region |
| Object detection | Region-Text | Image, text | Text, region |
| Dense region caption | Region-Text | Image, text | Text, region |
| Referring expression segmentation | Region-Text | Image, text | Text, region |
| Region to segmentation | Region-Text | Image, text | Text, region |
| Open vocabulary detection | Region-Text | Image, text | Text, region |
| Region to category | Region-Text | Image, text, region | Text |
| Region to description | Region-Text | Image, text, region | Text |
| OCR | Text | Image, text | Text |
| OCR with region | Region-Text | Image, text | Text, region |
Usage of Florence-2 large
First we import the libraries
from transformers import AutoProcessor, AutoModelForCausalLMfrom PIL import Imageimport requestsimport copyimport timeCopied
We create the model and the processor
model_id = 'microsoft/Florence-2-large'model = AutoModelForCausalLM.from_pretrained(model_id, trust_remote_code=True).eval().to('cuda')processor = AutoProcessor.from_pretrained(model_id, trust_remote_code=True)Copied
We create a function to build the prompt
def create_prompt(task_prompt, text_input=None):if text_input is None:prompt = task_promptelse:prompt = task_prompt + text_inputreturn promptCopied
Now a function to generate the output
def generate_answer(task_prompt, text_input=None):# Create promptprompt = create_prompt(task_prompt, text_input)# Get inputsinputs = processor(text=prompt, images=image, return_tensors="pt").to('cuda')# Get outputsgenerated_ids = model.generate(input_ids=inputs["input_ids"],pixel_values=inputs["pixel_values"],max_new_tokens=1024,early_stopping=False,do_sample=False,num_beams=3,)# Decode the generated IDsgenerated_text = processor.batch_decode(generated_ids, skip_special_tokens=False)[0]# Post-process the generated textparsed_answer = processor.post_process_generation(generated_text,task=task_prompt,image_size=(image.width, image.height))return parsed_answerCopied
We obtain an image on which we are going to test the model
url = "https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/transformers/tasks/car.jpg?download=true"image = Image.open(requests.get(url, stream=True).raw)imageCopied
<PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=640x480>
Tasks without additional prompts
Caption
task_prompt = '<CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")answerCopied
Time taken: 284.60 ms
{'<CAPTION>': 'A green car parked in front of a yellow building.'}
task_prompt = '<DETAILED_CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")answerCopied
Time taken: 491.69 ms
{'<DETAILED_CAPTION>': 'The image shows a blue Volkswagen Beetle parked in front of a yellow building with two brown doors, surrounded by trees and a clear blue sky.'}
task_prompt = '<MORE_DETAILED_CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")answerCopied
Time taken: 1011.38 ms
{'<MORE_DETAILED_CAPTION>': 'The image shows a vintage Volkswagen Beetle car parked on a cobblestone street in front of a yellow building with two wooden doors. The car is painted in a bright turquoise color and has a sleek, streamlined design. It has two doors on either side of the car, one on top of the other, and a small window on the front. The building appears to be old and dilapidated, with peeling paint and crumbling walls. The sky is blue and there are trees in the background.'}
Region Proposal
It is an object detection, but in this case it does not return the classes of the objects.
As we are going to obtain bounding boxes, first we are going to create a function to draw them on the image.
import matplotlib.pyplot as pltimport matplotlib.patches as patchesdef plot_bbox(image, data):# Create a figure and axesfig, ax = plt.subplots()# Display the imageax.imshow(image)# Plot each bounding boxfor bbox, label in zip(data['bboxes'], data['labels']):# Unpack the bounding box coordinatesx1, y1, x2, y2 = bbox# Create a Rectangle patchrect = patches.Rectangle((x1, y1), x2-x1, y2-y1, linewidth=1, edgecolor='r', facecolor='none')# Add the rectangle to the Axesax.add_patch(rect)# Annotate the labelplt.text(x1, y1, label, color='white', fontsize=8, bbox=dict(facecolor='red', alpha=0.5))# Remove the axis ticks and labelsax.axis('off')# Show the plotplt.show()Copied
task_prompt = '<REGION_PROPOSAL>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 439.41 ms{'<REGION_PROPOSAL>': {'bboxes': [[33.599998474121094, 159.59999084472656, 596.7999877929688, 371.7599792480469], [454.0799865722656, 96.23999786376953, 580.7999877929688, 261.8399963378906], [449.5999755859375, 276.239990234375, 554.5599975585938, 370.3199768066406], [91.19999694824219, 280.0799865722656, 198.0800018310547, 370.3199768066406], [224.3199920654297, 85.19999694824219, 333.7599792480469, 164.39999389648438], [274.239990234375, 178.8000030517578, 392.0, 228.239990234375], [165.44000244140625, 178.8000030517578, 264.6399841308594, 230.63999938964844]], 'labels': ['', '', '', '', '', '', '']}}
<Figure size 640x480 with 1 Axes>
Object detection
In this case it does return the classes of the objects
task_prompt = '<OD>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 385.74 ms{'<OD>': {'bboxes': [[33.599998474121094, 159.59999084472656, 596.7999877929688, 371.7599792480469], [454.0799865722656, 96.23999786376953, 580.7999877929688, 261.8399963378906], [224.95999145507812, 86.15999603271484, 333.7599792480469, 164.39999389648438], [449.5999755859375, 276.239990234375, 554.5599975585938, 370.3199768066406], [91.19999694824219, 280.0799865722656, 198.0800018310547, 370.3199768066406]], 'labels': ['car', 'door', 'door', 'wheel', 'wheel']}}
<Figure size 640x480 with 1 Axes>
Dense region caption
task_prompt = '<DENSE_REGION_CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 434.88 ms{'<DENSE_REGION_CAPTION>': {'bboxes': [[33.599998474121094, 159.59999084472656, 596.7999877929688, 371.7599792480469], [454.0799865722656, 96.72000122070312, 580.1599731445312, 261.8399963378906], [449.5999755859375, 276.239990234375, 554.5599975585938, 370.79998779296875], [91.83999633789062, 280.0799865722656, 198.0800018310547, 370.79998779296875], [224.95999145507812, 86.15999603271484, 333.7599792480469, 164.39999389648438]], 'labels': ['turquoise Volkswagen Beetle', 'wooden double doors with metal handles', 'wheel', 'wheel', 'door']}}
<Figure size 640x480 with 1 Axes>
Tasks with additional prompts
Phrase Grounding
task_prompt = '<CAPTION_TO_PHRASE_GROUNDING>'text_input="A green car parked in front of a yellow building."t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 327.24 ms{'<CAPTION_TO_PHRASE_GROUNDING>': {'bboxes': [[34.23999786376953, 159.1199951171875, 582.0800170898438, 374.6399841308594], [1.5999999046325684, 4.079999923706055, 639.0399780273438, 305.03997802734375]], 'labels': ['A green car', 'a yellow building']}}
<Figure size 640x480 with 1 Axes>
Referring expression segmentation
As we will obtain segmentation masks, we are going to create a function to paint them on the image.
from PIL import Image, ImageDraw, ImageFontimport randomimport numpy as npcolormap = ['blue','orange','green','purple','brown','pink','gray','olive','cyan','red','lime','indigo','violet','aqua','magenta','coral','gold','tan','skyblue']def draw_polygons(input_image, prediction, fill_mask=False):"""Draws segmentation masks with polygons on an image.Parameters:- input_image: Path to the image file.- prediction: Dictionary containing 'polygons' and 'labels' keys.'polygons' is a list of lists, each containing vertices of a polygon.'labels' is a list of labels corresponding to each polygon.- fill_mask: Boolean indicating whether to fill the polygons with color."""# Copy the input image to draw onimage = copy.deepcopy(input_image)# Load the imagedraw = ImageDraw.Draw(image)# Set up scale factor if needed (use 1 if not scaling)scale = 1# Iterate over polygons and labelsfor polygons, label in zip(prediction['polygons'], prediction['labels']):color = random.choice(colormap)fill_color = random.choice(colormap) if fill_mask else Nonefor _polygon in polygons:_polygon = np.array(_polygon).reshape(-1, 2)if len(_polygon) < 3:print('Invalid polygon:', _polygon)continue_polygon = (_polygon * scale).reshape(-1).tolist()# Draw the polygonif fill_mask:draw.polygon(_polygon, outline=color, fill=fill_color)else:draw.polygon(_polygon, outline=color)# Draw the label textdraw.text((_polygon[0] + 8, _polygon[1] + 2), label, fill=color)# Save or display the image#image.show() # Display the imagedisplay(image)Copied
task_prompt = '<REFERRING_EXPRESSION_SEGMENTATION>'text_input="a green car"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)draw_polygons(image, answer[task_prompt], fill_mask=True)Copied
Time taken: 4854.74 ms{'<REFERRING_EXPRESSION_SEGMENTATION>': {'polygons': [[[180.8000030517578, 180.72000122070312, 182.72000122070312, 180.72000122070312, 187.83999633789062, 177.83999633789062, 189.75999450683594, 177.83999633789062, 192.95999145507812, 175.9199981689453, 194.87998962402344, 175.9199981689453, 198.0800018310547, 174.0, 200.63999938964844, 173.0399932861328, 203.83999633789062, 172.0800018310547, 207.0399932861328, 170.63999938964844, 209.59999084472656, 169.67999267578125, 214.0800018310547, 168.72000122070312, 217.9199981689453, 167.75999450683594, 221.75999450683594, 166.8000030517578, 226.239990234375, 165.83999633789062, 230.72000122070312, 164.87998962402344, 237.1199951171875, 163.9199981689453, 244.1599884033203, 162.95999145507812, 253.1199951171875, 162.0, 265.2799987792969, 161.0399932861328, 312.6399841308594, 161.0399932861328, 328.6399841308594, 162.0, 337.6000061035156, 162.95999145507812, 344.6399841308594, 163.9199981689453, 349.7599792480469, 164.87998962402344, 353.6000061035156, 165.83999633789062, 358.0799865722656, 166.8000030517578, 361.91998291015625, 167.75999450683594, 365.7599792480469, 168.72000122070312, 369.6000061035156, 169.67999267578125, 372.79998779296875, 170.63999938964844, 374.7200012207031, 172.0800018310547, 377.91998291015625, 174.95999145507812, 379.8399963378906, 177.83999633789062, 381.7599792480469, 180.72000122070312, 383.67999267578125, 183.59999084472656, 385.6000061035156, 186.95999145507812, 387.5199890136719, 189.83999633789062, 388.79998779296875, 192.72000122070312, 390.7200012207031, 194.63999938964844, 392.0, 197.51998901367188, 393.91998291015625, 200.87998962402344, 395.8399963378906, 203.75999450683594, 397.7599792480469, 206.63999938964844, 399.67999267578125, 209.51998901367188, 402.8800048828125, 212.87998962402344, 404.79998779296875, 212.87998962402344, 406.7200012207031, 213.83999633789062, 408.6399841308594, 215.75999450683594, 408.6399841308594, 217.67999267578125, 410.55999755859375, 219.59999084472656, 412.47998046875, 220.55999755859375, 431.03997802734375, 220.55999755859375, 431.67999267578125, 221.51998901367188, 443.8399963378906, 222.47999572753906, 457.91998291015625, 222.47999572753906, 466.8799743652344, 223.44000244140625, 473.91998291015625, 224.87998962402344, 479.67999267578125, 225.83999633789062, 486.0799865722656, 226.79998779296875, 491.1999816894531, 227.75999450683594, 495.03997802734375, 228.72000122070312, 498.8799743652344, 229.67999267578125, 502.0799865722656, 230.63999938964844, 505.2799987792969, 231.59999084472656, 507.8399963378906, 232.55999755859375, 511.03997802734375, 233.51998901367188, 514.239990234375, 234.47999572753906, 516.7999877929688, 235.4399871826172, 520.0, 237.36000061035156, 521.9199829101562, 237.36000061035156, 534.0800170898438, 243.59999084472656, 537.2799682617188, 245.51998901367188, 541.1199951171875, 249.36000061035156, 544.9599609375, 251.75999450683594, 548.1599731445312, 252.72000122070312, 551.3599853515625, 253.67999267578125, 553.2799682617188, 253.67999267578125, 556.47998046875, 255.59999084472656, 558.3999633789062, 255.59999084472656, 567.3599853515625, 260.3999938964844, 569.2799682617188, 260.3999938964844, 571.2000122070312, 261.3599853515625, 573.1199951171875, 263.2799987792969, 574.3999633789062, 265.67999267578125, 574.3999633789062, 267.6000061035156, 573.1199951171875, 268.55999755859375, 572.47998046875, 271.44000244140625, 572.47998046875, 281.5199890136719, 573.1199951171875, 286.32000732421875, 574.3999633789062, 287.2799987792969, 575.0399780273438, 290.6399841308594, 576.3200073242188, 293.5199890136719, 576.3200073242188, 309.3599853515625, 576.3200073242188, 312.239990234375, 576.3200073242188, 314.1600036621094, 577.5999755859375, 315.1199951171875, 578.239990234375, 318.47998046875, 578.239990234375, 320.3999938964844, 576.3200073242188, 321.3599853515625, 571.2000122070312, 322.32000732421875, 564.1599731445312, 323.2799987792969, 555.2000122070312, 323.2799987792969, 553.2799682617188, 325.1999816894531, 553.2799682617188, 333.3599853515625, 552.0, 337.1999816894531, 551.3599853515625, 340.0799865722656, 550.0800170898438, 343.44000244140625, 548.1599731445312, 345.3599853515625, 546.8800048828125, 348.239990234375, 544.9599609375, 351.1199951171875, 543.0399780273438, 354.47998046875, 534.0800170898438, 363.1199951171875, 530.8800048828125, 365.03997802734375, 525.1199951171875, 368.3999938964844, 521.9199829101562, 369.3599853515625, 518.0800170898438, 370.3199768066406, 496.9599914550781, 370.3199768066406, 491.1999816894531, 369.3599853515625, 488.0, 368.3999938964844, 484.79998779296875, 367.44000244140625, 480.9599914550781, 365.03997802734375, 477.7599792480469, 363.1199951171875, 475.1999816894531, 361.1999816894531, 464.9599914550781, 351.1199951171875, 463.03997802734375, 348.239990234375, 461.1199951171875, 345.3599853515625, 459.8399963378906, 343.44000244140625, 459.8399963378906, 341.03997802734375, 457.91998291015625, 338.1600036621094, 457.91998291015625, 336.239990234375, 456.6399841308594, 334.32000732421875, 454.7200012207031, 332.3999938964844, 452.79998779296875, 333.3599853515625, 448.9599914550781, 337.1999816894531, 447.03997802734375, 338.1600036621094, 426.55999755859375, 337.1999816894531, 424.0, 337.1999816894531, 422.7200012207031, 338.1600036621094, 419.5199890136719, 339.1199951171875, 411.8399963378906, 339.1199951171875, 410.55999755859375, 338.1600036621094, 379.8399963378906, 337.1999816894531, 376.0, 337.1999816894531, 374.7200012207031, 338.1600036621094, 365.7599792480469, 337.1999816894531, 361.91998291015625, 337.1999816894531, 360.6399841308594, 338.1600036621094, 351.67999267578125, 337.1999816894531, 347.8399963378906, 337.1999816894531, 346.55999755859375, 338.1600036621094, 340.79998779296875, 337.1999816894531, 337.6000061035156, 337.1999816894531, 336.9599914550781, 338.1600036621094, 328.6399841308594, 337.1999816894531, 323.5199890136719, 337.1999816894531, 322.8800048828125, 338.1600036621094, 314.55999755859375, 337.1999816894531, 310.7200012207031, 337.1999816894531, 309.44000244140625, 338.1600036621094, 301.7599792480469, 337.1999816894531, 298.55999755859375, 337.1999816894531, 297.91998291015625, 338.1600036621094, 289.6000061035156, 337.1999816894531, 287.67999267578125, 337.1999816894531, 286.3999938964844, 338.1600036621094, 279.3599853515625, 337.1999816894531, 275.5199890136719, 337.1999816894531, 274.239990234375, 338.1600036621094, 267.1999816894531, 337.1999816894531, 265.2799987792969, 337.1999816894531, 264.6399841308594, 338.1600036621094, 256.32000732421875, 337.1999816894531, 254.39999389648438, 337.1999816894531, 253.1199951171875, 338.1600036621094, 246.0800018310547, 337.1999816894531, 244.1599884033203, 337.1999816894531, 243.51998901367188, 338.1600036621094, 235.1999969482422, 337.1999816894531, 232.0, 337.1999816894531, 231.36000061035156, 338.1600036621094, 223.0399932861328, 337.1999816894531, 217.9199981689453, 337.1999816894531, 217.27999877929688, 338.1600036621094, 214.0800018310547, 339.1199951171875, 205.1199951171875, 339.1199951171875, 201.9199981689453, 338.1600036621094, 200.0, 337.1999816894531, 198.0800018310547, 335.2799987792969, 196.1599884033203, 334.32000732421875, 194.239990234375, 334.32000732421875, 191.67999267578125, 336.239990234375, 191.0399932861328, 338.1600036621094, 191.0399932861328, 340.0799865722656, 189.1199951171875, 343.44000244140625, 189.1199951171875, 345.3599853515625, 187.83999633789062, 347.2799987792969, 185.9199981689453, 349.1999816894531, 184.63999938964844, 352.0799865722656, 182.72000122070312, 355.44000244140625, 180.8000030517578, 358.3199768066406, 176.95999145507812, 362.1600036621094, 173.75999450683594, 364.0799865722656, 170.55999755859375, 366.0, 168.63999938964844, 367.44000244140625, 166.0800018310547, 368.3999938964844, 162.87998962402344, 369.3599853515625, 159.67999267578125, 370.3199768066406, 152.63999938964844, 371.2799987792969, 131.52000427246094, 371.2799987792969, 127.68000030517578, 370.3199768066406, 124.47999572753906, 369.3599853515625, 118.7199935913086, 366.0, 115.5199966430664, 364.0799865722656, 111.68000030517578, 361.1999816894531, 106.55999755859375, 356.3999938964844, 104.63999938964844, 353.03997802734375, 103.36000061035156, 350.1600036621094, 101.43999481201172, 348.239990234375, 100.79999542236328, 346.32000732421875, 99.5199966430664, 343.44000244140625, 99.5199966430664, 340.0799865722656, 98.23999786376953, 337.1999816894531, 96.31999969482422, 335.2799987792969, 94.4000015258789, 334.32000732421875, 87.36000061035156, 334.32000732421875, 81.5999984741211, 335.2799987792969, 80.31999969482422, 336.239990234375, 74.55999755859375, 337.1999816894531, 66.23999786376953, 337.1999816894531, 64.31999969482422, 335.2799987792969, 53.439998626708984, 335.2799987792969, 50.23999786376953, 334.32000732421875, 48.31999969482422, 333.3599853515625, 47.03999710083008, 331.44000244140625, 47.03999710083008, 329.03997802734375, 48.31999969482422, 327.1199951171875, 50.23999786376953, 325.1999816894531, 50.23999786376953, 323.2799987792969, 43.20000076293945, 322.32000732421875, 40.0, 321.3599853515625, 38.07999801635742, 320.3999938964844, 37.439998626708984, 318.47998046875, 36.15999984741211, 312.239990234375, 36.15999984741211, 307.44000244140625, 38.07999801635742, 305.5199890136719, 40.0, 304.55999755859375, 43.20000076293945, 303.6000061035156, 46.39999771118164, 302.6399841308594, 53.439998626708984, 301.67999267578125, 66.23999786376953, 301.67999267578125, 68.15999603271484, 299.2799987792969, 69.43999481201172, 297.3599853515625, 69.43999481201172, 293.5199890136719, 68.15999603271484, 292.55999755859375, 67.5199966430664, 287.2799987792969, 67.5199966430664, 277.67999267578125, 68.15999603271484, 274.32000732421875, 69.43999481201172, 272.3999938964844, 73.27999877929688, 268.55999755859375, 75.19999694824219, 267.6000061035156, 78.4000015258789, 266.6399841308594, 80.31999969482422, 266.6399841308594, 82.23999786376953, 264.7200012207031, 81.5999984741211, 260.3999938964844, 81.5999984741211, 258.47998046875, 83.5199966430664, 257.5199890136719, 87.36000061035156, 257.5199890136719, 89.27999877929688, 256.55999755859375, 96.31999969482422, 249.36000061035156, 96.31999969482422, 248.39999389648438, 106.55999755859375, 237.36000061035156, 110.39999389648438, 233.51998901367188, 112.31999969482422, 231.59999084472656, 120.63999938964844, 223.44000244140625, 123.83999633789062, 221.51998901367188, 126.39999389648438, 220.55999755859375, 129.59999084472656, 218.63999938964844, 132.8000030517578, 216.72000122070312, 136.63999938964844, 213.83999633789062, 141.75999450683594, 209.51998901367188, 148.8000030517578, 202.8000030517578, 153.9199981689453, 198.95999145507812, 154.55999755859375, 198.95999145507812, 157.75999450683594, 196.55999755859375, 161.59999084472656, 193.67999267578125, 168.63999938964844, 186.95999145507812, 171.83999633789062, 186.0, 173.75999450683594, 183.59999084472656, 178.87998962402344, 181.67999267578125, 180.8000030517578, 179.75999450683594]]], 'labels': ['']}}
<PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=640x480>
Region to Segmentation
task_prompt = '<REGION_TO_SEGMENTATION>'text_input="<loc_702><loc_575><loc_866><loc_772>"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)draw_polygons(image, answer[task_prompt], fill_mask=True)Copied
Time taken: 1246.26 ms{'<REGION_TO_SEGMENTATION>': {'polygons': [[[468.79998779296875, 288.239990234375, 472.6399841308594, 285.3599853515625, 475.8399963378906, 283.44000244140625, 477.7599792480469, 282.47998046875, 479.67999267578125, 282.47998046875, 482.8799743652344, 280.55999755859375, 485.44000244140625, 279.6000061035156, 488.6399841308594, 278.6399841308594, 491.8399963378906, 277.67999267578125, 497.5999755859375, 276.7200012207031, 511.67999267578125, 276.7200012207031, 514.8800048828125, 277.67999267578125, 518.0800170898438, 278.6399841308594, 520.6400146484375, 280.55999755859375, 522.5599975585938, 280.55999755859375, 524.47998046875, 282.47998046875, 527.6799926757812, 283.44000244140625, 530.8800048828125, 285.3599853515625, 534.0800170898438, 287.2799987792969, 543.0399780273438, 296.3999938964844, 544.9599609375, 299.2799987792969, 546.8800048828125, 302.1600036621094, 548.7999877929688, 306.47998046875, 548.7999877929688, 308.3999938964844, 550.719970703125, 311.2799987792969, 552.0, 314.1600036621094, 552.6400146484375, 318.47998046875, 552.6400146484375, 333.3599853515625, 552.0, 337.1999816894531, 550.719970703125, 340.0799865722656, 550.0800170898438, 343.44000244140625, 548.7999877929688, 345.3599853515625, 546.8800048828125, 347.2799987792969, 545.5999755859375, 350.1600036621094, 543.6799926757812, 353.03997802734375, 541.760009765625, 356.3999938964844, 536.0, 362.1600036621094, 532.7999877929688, 364.0799865722656, 529.5999755859375, 366.0, 527.6799926757812, 366.9599914550781, 525.760009765625, 366.9599914550781, 522.5599975585938, 369.3599853515625, 518.0800170898438, 370.3199768066406, 495.67999267578125, 370.3199768066406, 489.91998291015625, 369.3599853515625, 486.7200012207031, 368.3999938964844, 483.5199890136719, 366.9599914550781, 479.67999267578125, 365.03997802734375, 476.47998046875, 363.1199951171875, 473.91998291015625, 361.1999816894531, 465.5999755859375, 353.03997802734375, 462.3999938964844, 349.1999816894531, 460.47998046875, 346.32000732421875, 458.55999755859375, 342.47998046875, 457.91998291015625, 339.1199951171875, 456.6399841308594, 336.239990234375, 455.3599853515625, 333.3599853515625, 454.7200012207031, 329.5199890136719, 454.7200012207031, 315.1199951171875, 455.3599853515625, 310.32000732421875, 456.6399841308594, 306.47998046875, 457.91998291015625, 303.1199951171875, 459.8399963378906, 300.239990234375, 459.8399963378906, 298.32000732421875, 460.47998046875, 296.3999938964844, 462.3999938964844, 293.5199890136719, 465.5999755859375, 289.1999816894531]]], 'labels': ['']}}
<PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=640x480>
Open vocabulary detection
As we will be obtaining dictionaries with bounding boxes along with their labels, we are going to create a function to format the data and be able to reuse the bounding box drawing function.
def convert_to_od_format(data):"""Converts a dictionary with 'bboxes' and 'bboxes_labels' into a dictionary with separate 'bboxes' and 'labels' keys.Parameters:- data: The input dictionary with 'bboxes', 'bboxes_labels', 'polygons', and 'polygons_labels' keys.Returns:- A dictionary with 'bboxes' and 'labels' keys formatted for object detection results."""# Extract bounding boxes and labelsbboxes = data.get('bboxes', [])labels = data.get('bboxes_labels', [])# Construct the output formatod_results = {'bboxes': bboxes,'labels': labels}return od_resultsCopied
task_prompt = '<OPEN_VOCABULARY_DETECTION>'text_input="a green car"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)bbox_results = convert_to_od_format(answer[task_prompt])plot_bbox(image, bbox_results)Copied
Time taken: 256.23 ms{'<OPEN_VOCABULARY_DETECTION>': {'bboxes': [[34.23999786376953, 158.63999938964844, 582.0800170898438, 374.1600036621094]], 'bboxes_labels': ['a green car'], 'polygons': [], 'polygons_labels': []}}
<Figure size 640x480 with 1 Axes>
Region to category
task_prompt = '<REGION_TO_CATEGORY>'text_input="<loc_52><loc_332><loc_932><loc_774>"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)Copied
Time taken: 231.91 ms{'<REGION_TO_CATEGORY>': 'car<loc_52><loc_332><loc_932><loc_774>'}
Region to description
task_prompt = '<REGION_TO_DESCRIPTION>'text_input="<loc_52><loc_332><loc_932><loc_774>"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)Copied
Time taken: 269.62 ms{'<REGION_TO_DESCRIPTION>': 'turquoise Volkswagen Beetle<loc_52><loc_332><loc_932><loc_774>'}
OCR Tasks
We use a new image
url = "http://ecx.images-amazon.com/images/I/51UUzBDAMsL.jpg?download=true"image = Image.open(requests.get(url, stream=True).raw).convert('RGB')imageCopied
<PIL.Image.Image image mode=RGB size=403x500>
OCR
task_prompt = '<OCR>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)Copied
Time taken: 424.52 ms{'<OCR>': 'CUDAFOR ENGINEERSAn Introduction to High-PerformanceParallel ComputingDUANE STORTIMETE YURTOGLU'}
OCR with region
As we are going to obtain the text from OCR and its regions, we are going to create a function to paint them on the image.
def draw_ocr_bboxes(input_image, prediction):image = copy.deepcopy(input_image)scale = 1draw = ImageDraw.Draw(image)bboxes, labels = prediction['quad_boxes'], prediction['labels']for box, label in zip(bboxes, labels):color = random.choice(colormap)new_box = (np.array(box) * scale).tolist()draw.polygon(new_box, width=3, outline=color)draw.text((new_box[0]+8, new_box[1]+2),"{}".format(label),align="right",fill=color)display(image)Copied
task_prompt = '<OCR_WITH_REGION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)draw_ocr_bboxes(image, answer[task_prompt])Copied
Time taken: 758.95 ms{'<OCR_WITH_REGION>': {'quad_boxes': [[167.0435028076172, 50.25, 375.7974853515625, 50.25, 375.7974853515625, 114.75, 167.0435028076172, 114.75], [144.8784942626953, 120.75, 375.7974853515625, 120.75, 375.7974853515625, 149.25, 144.8784942626953, 149.25], [115.86249542236328, 165.25, 376.6034851074219, 166.25, 376.6034851074219, 184.25, 115.86249542236328, 183.25], [239.9864959716797, 184.25, 376.6034851074219, 186.25, 376.6034851074219, 204.25, 239.9864959716797, 202.25], [266.1814880371094, 441.25, 376.6034851074219, 441.25, 376.6034851074219, 456.25, 266.1814880371094, 456.25], [252.0764923095703, 460.25, 376.6034851074219, 460.25, 376.6034851074219, 475.25, 252.0764923095703, 475.25]], 'labels': ['</s>CUDA', 'FOR ENGINEERS', 'An Introduction to High-Performance', 'Parallel Computing', 'DUANE STORTI', 'METE YURTOGLU']}}
<PIL.Image.Image image mode=RGB size=403x500>
Usage of Florence-2 large fine tuning
We create the model and the processor
model_id = 'microsoft/Florence-2-large-ft'model = AutoModelForCausalLM.from_pretrained(model_id, trust_remote_code=True).eval().to('cuda')processor = AutoProcessor.from_pretrained(model_id, trust_remote_code=True)Copied
We get the car image again
url = "https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/transformers/tasks/car.jpg?download=true"image = Image.open(requests.get(url, stream=True).raw)imageCopied
<PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=640x480>
Tasks without additional prompts
Caption
task_prompt = '<CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")answerCopied
Time taken: 292.35 ms
{'<CAPTION>': 'A green car parked in front of a yellow building.'}
task_prompt = '<DETAILED_CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")answerCopied
Time taken: 437.06 ms
{'<DETAILED_CAPTION>': 'In this image we can see a car on the road. In the background there is a building with doors. At the top of the image there are trees.'}
task_prompt = '<MORE_DETAILED_CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")answerCopied
Time taken: 779.38 ms
{'<MORE_DETAILED_CAPTION>': 'A light blue Volkswagen Beetle is parked in front of a building. The building is yellow and has two brown doors on it. The door on the right is closed and the one on the left is closed. The car is parked on a paved sidewalk.'}
Region proposal
It is object detection, but in this case it does not return the classes of the objects.
task_prompt = '<REGION_PROPOSAL>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 255.08 ms{'<REGION_PROPOSAL>': {'bboxes': [[34.880001068115234, 161.0399932861328, 596.7999877929688, 370.79998779296875]], 'labels': ['']}}
<Figure size 640x480 with 1 Axes>
Object detection
In this case it does return the classes of the objects
task_prompt = '<OD>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 245.54 ms{'<OD>': {'bboxes': [[34.880001068115234, 161.51998901367188, 596.7999877929688, 370.79998779296875]], 'labels': ['car']}}
<Figure size 640x480 with 1 Axes>
Dense region caption
task_prompt = '<DENSE_REGION_CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 282.75 ms{'<DENSE_REGION_CAPTION>': {'bboxes': [[34.880001068115234, 161.51998901367188, 596.7999877929688, 370.79998779296875]], 'labels': ['turquoise Volkswagen Beetle']}}
<Figure size 640x480 with 1 Axes>
Tasks with additional prompts
Phrase Grounding
task_prompt = '<CAPTION_TO_PHRASE_GROUNDING>'text_input="A green car parked in front of a yellow building."t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 305.79 ms{'<CAPTION_TO_PHRASE_GROUNDING>': {'bboxes': [[34.880001068115234, 159.59999084472656, 598.719970703125, 374.6399841308594], [1.5999999046325684, 4.079999923706055, 639.0399780273438, 304.0799865722656]], 'labels': ['A green car', 'a yellow building']}}
<Figure size 640x480 with 1 Axes>
Referring expression segmentation
task_prompt = '<REFERRING_EXPRESSION_SEGMENTATION>'text_input="a green car"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)draw_polygons(image, answer[task_prompt], fill_mask=True)Copied
Time taken: 745.87 ms{'<REFERRING_EXPRESSION_SEGMENTATION>': {'polygons': [[[178.239990234375, 184.0800018310547, 256.32000732421875, 161.51998901367188, 374.7200012207031, 170.63999938964844, 408.0, 220.0800018310547, 480.9599914550781, 225.36000061035156, 539.2000122070312, 247.9199981689453, 573.760009765625, 266.6399841308594, 575.6799926757812, 289.1999816894531, 598.0800170898438, 293.5199890136719, 596.1599731445312, 309.8399963378906, 576.9599609375, 309.8399963378906, 576.9599609375, 321.3599853515625, 554.5599975585938, 322.32000732421875, 547.5199584960938, 354.47998046875, 525.1199951171875, 369.8399963378906, 488.0, 369.8399963378906, 463.67999267578125, 354.47998046875, 453.44000244140625, 332.8800048828125, 446.3999938964844, 340.0799865722656, 205.1199951171875, 340.0799865722656, 196.1599884033203, 334.79998779296875, 182.0800018310547, 361.67999267578125, 148.8000030517578, 370.79998779296875, 121.27999877929688, 369.8399963378906, 98.87999725341797, 349.1999816894531, 93.75999450683594, 332.8800048828125, 64.31999969482422, 339.1199951171875, 41.91999816894531, 334.79998779296875, 48.959999084472656, 326.6399841308594, 36.79999923706055, 321.3599853515625, 34.880001068115234, 303.6000061035156, 66.23999786376953, 301.67999267578125, 68.15999603271484, 289.1999816894531, 68.15999603271484, 268.55999755859375, 81.5999984741211, 263.2799987792969, 116.15999603271484, 227.27999877929688]]], 'labels': ['']}}
<PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=640x480>
Region to Segmentation
task_prompt = '<REGION_TO_SEGMENTATION>'text_input="<loc_702><loc_575><loc_866><loc_772>"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)draw_polygons(image, answer[task_prompt], fill_mask=True)Copied
Time taken: 358.71 ms{'<REGION_TO_SEGMENTATION>': {'polygons': [[[468.1600036621094, 292.0799865722656, 495.67999267578125, 276.239990234375, 523.2000122070312, 279.6000061035156, 546.8800048828125, 297.8399963378906, 555.8399658203125, 324.7200012207031, 548.7999877929688, 351.6000061035156, 529.5999755859375, 369.3599853515625, 493.7599792480469, 371.7599792480469, 468.1600036621094, 359.2799987792969, 449.5999755859375, 334.79998779296875]]], 'labels': ['']}}
<PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=640x480>
Open vocabulary detection
task_prompt = '<OPEN_VOCABULARY_DETECTION>'text_input="a green car"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)bbox_results = convert_to_od_format(answer[task_prompt])plot_bbox(image, bbox_results)Copied
Time taken: 245.96 ms{'<OPEN_VOCABULARY_DETECTION>': {'bboxes': [[34.880001068115234, 159.59999084472656, 598.719970703125, 374.6399841308594]], 'bboxes_labels': ['a green car'], 'polygons': [], 'polygons_labels': []}}
<Figure size 640x480 with 1 Axes>
Region to category
task_prompt = '<REGION_TO_CATEGORY>'text_input="<loc_52><loc_332><loc_932><loc_774>"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)Copied
Time taken: 246.42 ms{'<REGION_TO_CATEGORY>': 'car<loc_52><loc_332><loc_932><loc_774>'}
Region to description
task_prompt = '<REGION_TO_DESCRIPTION>'text_input="<loc_52><loc_332><loc_932><loc_774>"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)Copied
Time taken: 280.67 ms{'<REGION_TO_DESCRIPTION>': 'turquoise Volkswagen Beetle<loc_52><loc_332><loc_932><loc_774>'}
OCR Tasks
We use a new image
url = "http://ecx.images-amazon.com/images/I/51UUzBDAMsL.jpg?download=true"image = Image.open(requests.get(url, stream=True).raw).convert('RGB')imageCopied
<PIL.Image.Image image mode=RGB size=403x500>
OCR
task_prompt = '<OCR>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)Copied
Time taken: 444.77 ms{'<OCR>': 'CUDAFOR ENGINEERSAn Introduction to High-PerformanceParallel ComputingDUANE STORTIMETE YURTOGLU'}
OCR with region
task_prompt = '<OCR_WITH_REGION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)draw_ocr_bboxes(image, answer[task_prompt])Copied
Time taken: 771.91 ms{'<OCR_WITH_REGION>': {'quad_boxes': [[167.0435028076172, 50.25, 375.7974853515625, 50.25, 375.7974853515625, 114.75, 167.0435028076172, 114.75], [144.47549438476562, 121.25, 375.7974853515625, 121.25, 375.7974853515625, 149.25, 144.47549438476562, 149.25], [115.86249542236328, 166.25, 376.6034851074219, 166.25, 376.6034851074219, 183.75, 115.86249542236328, 183.25], [239.9864959716797, 184.75, 376.6034851074219, 186.25, 376.6034851074219, 203.75, 239.9864959716797, 201.75], [265.77850341796875, 441.25, 376.6034851074219, 441.25, 376.6034851074219, 456.25, 265.77850341796875, 456.25], [251.67349243164062, 460.25, 376.6034851074219, 460.25, 376.6034851074219, 474.75, 251.67349243164062, 474.75]], 'labels': ['</s>CUDA', 'FOR ENGINEERS', 'An Introduction to High-Performance', 'Parallel Computing', 'DUANE STORTI', 'METE YURTOGLU']}}
<PIL.Image.Image image mode=RGB size=403x500>
Usage of Florence-2 base
We create the model and the processor
model_id = 'microsoft/Florence-2-base'model = AutoModelForCausalLM.from_pretrained(model_id, trust_remote_code=True).eval().to('cuda')processor = AutoProcessor.from_pretrained(model_id, trust_remote_code=True)Copied
We get the car image again
url = "https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/transformers/tasks/car.jpg?download=true"image = Image.open(requests.get(url, stream=True).raw)imageCopied
<PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=640x480>
Tasks without additional prompts
Caption
task_prompt = '<CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")answerCopied
Time taken: 158.48 ms
{'<CAPTION>': 'A green car parked in front of a yellow building.'}
task_prompt = '<DETAILED_CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")answerCopied
Time taken: 271.37 ms
{'<DETAILED_CAPTION>': 'The image shows a green car parked in front of a yellow building with two brown doors. The car is on the road and the sky is visible in the background.'}
task_prompt = '<MORE_DETAILED_CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")answerCopied
Time taken: 476.14 ms
{'<MORE_DETAILED_CAPTION>': 'The image shows a vintage Volkswagen Beetle car parked on a cobblestone street in front of a yellow building with two wooden doors. The car is a light blue color with a white stripe running along the side. It has two large, round wheels with silver rims. The building appears to be old and dilapidated, with peeling paint and crumbling walls. The sky is blue and there are trees in the background.'}
Region proposal
It is an object detection, but in this case it does not return the classes of the objects.
task_prompt = '<REGION_PROPOSAL>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 235.72 ms{'<REGION_PROPOSAL>': {'bboxes': [[34.23999786376953, 160.0800018310547, 596.7999877929688, 372.239990234375], [453.44000244140625, 95.75999450683594, 581.4400024414062, 262.79998779296875], [450.239990234375, 276.7200012207031, 555.2000122070312, 370.79998779296875], [91.83999633789062, 280.55999755859375, 198.0800018310547, 370.79998779296875], [224.95999145507812, 86.63999938964844, 333.7599792480469, 164.87998962402344], [273.6000061035156, 178.8000030517578, 392.0, 228.72000122070312], [166.0800018310547, 179.27999877929688, 264.6399841308594, 230.63999938964844]], 'labels': ['', '', '', '', '', '', '']}}
<Figure size 640x480 with 1 Axes>
Object detection
In this case it does return the classes of the objects
task_prompt = '<OD>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 190.37 ms{'<OD>': {'bboxes': [[34.880001068115234, 160.0800018310547, 597.4400024414062, 372.239990234375], [454.7200012207031, 96.23999786376953, 581.4400024414062, 262.79998779296875], [452.1600036621094, 276.7200012207031, 555.2000122070312, 370.79998779296875], [93.75999450683594, 280.55999755859375, 198.72000122070312, 371.2799987792969]], 'labels': ['car', 'door', 'wheel', 'wheel']}}
<Figure size 640x480 with 1 Axes>
Dense region caption
task_prompt = '<DENSE_REGION_CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 242.62 ms{'<DENSE_REGION_CAPTION>': {'bboxes': [[34.880001068115234, 160.0800018310547, 597.4400024414062, 372.239990234375], [454.0799865722656, 95.75999450683594, 582.0800170898438, 262.79998779296875], [450.8800048828125, 276.7200012207031, 555.8399658203125, 370.79998779296875], [92.47999572753906, 280.55999755859375, 199.36000061035156, 370.79998779296875], [225.59999084472656, 87.1199951171875, 334.3999938964844, 164.39999389648438]], 'labels': ['turquoise Volkswagen Beetle', 'wooden door with metal handle and lock', 'wheel', 'wheel', 'door']}}
<Figure size 640x480 with 1 Axes>
Tasks with additional prompts
Phrase Grounding
task_prompt = '<CAPTION_TO_PHRASE_GROUNDING>'text_input="A green car parked in front of a yellow building."t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 183.85 ms{'<CAPTION_TO_PHRASE_GROUNDING>': {'bboxes': [[34.880001068115234, 159.1199951171875, 582.719970703125, 375.1199951171875], [0.3199999928474426, 0.23999999463558197, 639.0399780273438, 305.5199890136719]], 'labels': ['A green car', 'a yellow building']}}
<Figure size 640x480 with 1 Axes>
Referring expression segmentation
task_prompt = '<REFERRING_EXPRESSION_SEGMENTATION>'text_input="a green car"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)draw_polygons(image, answer[task_prompt], fill_mask=True)Copied
Time taken: 2531.89 ms{'<REFERRING_EXPRESSION_SEGMENTATION>': {'polygons': [[[178.87998962402344, 182.1599884033203, 180.8000030517578, 182.1599884033203, 185.9199981689453, 178.8000030517578, 187.83999633789062, 178.8000030517578, 191.0399932861328, 176.87998962402344, 192.95999145507812, 176.87998962402344, 196.1599884033203, 174.95999145507812, 198.72000122070312, 174.0, 201.9199981689453, 173.0399932861328, 205.1199951171875, 172.0800018310547, 207.67999267578125, 170.63999938964844, 212.1599884033203, 169.67999267578125, 216.0, 168.72000122070312, 219.83999633789062, 167.75999450683594, 223.67999267578125, 166.8000030517578, 228.1599884033203, 165.83999633789062, 233.9199981689453, 164.87998962402344, 240.95999145507812, 163.9199981689453, 249.9199981689453, 162.95999145507812, 262.0799865722656, 162.0, 313.2799987792969, 162.0, 329.2799987792969, 162.95999145507812, 338.239990234375, 163.9199981689453, 344.0, 164.87998962402344, 349.1199951171875, 165.83999633789062, 352.9599914550781, 166.8000030517578, 357.44000244140625, 167.75999450683594, 361.2799987792969, 168.72000122070312, 365.1199951171875, 169.67999267578125, 368.9599914550781, 170.63999938964844, 372.1600036621094, 172.0800018310547, 374.0799865722656, 173.0399932861328, 377.2799987792969, 175.9199981689453, 379.1999816894531, 178.8000030517578, 381.1199951171875, 182.1599884033203, 383.03997802734375, 185.0399932861328, 384.9599914550781, 187.9199981689453, 386.239990234375, 190.8000030517578, 388.1600036621094, 192.72000122070312, 389.44000244140625, 196.0800018310547, 391.3599853515625, 198.95999145507812, 393.2799987792969, 201.83999633789062, 395.1999816894531, 204.72000122070312, 397.1199951171875, 208.0800018310547, 400.3199768066406, 210.95999145507812, 404.1600036621094, 213.83999633789062, 407.3599853515625, 214.79998779296875, 409.2799987792969, 216.72000122070312, 409.2799987792969, 219.1199951171875, 411.1999816894531, 221.0399932861328, 428.47998046875, 221.0399932861328, 429.1199951171875, 222.0, 441.2799987792969, 222.95999145507812, 455.3599853515625, 222.95999145507812, 464.3199768066406, 223.9199981689453, 471.3599853515625, 224.87998962402344, 477.1199951171875, 225.83999633789062, 482.239990234375, 226.79998779296875, 487.3599853515625, 227.75999450683594, 491.1999816894531, 228.72000122070312, 495.03997802734375, 230.1599884033203, 498.239990234375, 231.1199951171875, 502.0799865722656, 232.0800018310547, 505.2799987792969, 233.0399932861328, 508.47998046875, 234.0, 511.03997802734375, 234.95999145507812, 514.239990234375, 236.87998962402344, 516.1599731445312, 236.87998962402344, 519.3599853515625, 238.79998779296875, 521.2799682617188, 238.79998779296875, 527.0399780273438, 242.1599884033203, 528.9599609375, 244.0800018310547, 532.1599731445312, 245.0399932861328, 535.3599853515625, 246.95999145507812, 537.9199829101562, 248.87998962402344, 541.1199951171875, 252.239990234375, 543.0399780273438, 253.1999969482422, 546.239990234375, 254.1599884033203, 549.4400024414062, 254.1599884033203, 552.0, 255.1199951171875, 555.2000122070312, 257.0400085449219, 557.1199951171875, 257.0400085449219, 559.0399780273438, 258.0, 560.9599609375, 259.91998291015625, 564.1599731445312, 260.8800048828125, 566.0800170898438, 260.8800048828125, 568.0, 261.8399963378906, 569.9199829101562, 263.7599792480469, 571.2000122070312, 266.1600036621094, 571.8399658203125, 269.0400085449219, 573.1199951171875, 272.8800048828125, 573.1199951171875, 283.91998291015625, 573.760009765625, 290.1600036621094, 575.0399780273438, 292.0799865722656, 576.9599609375, 294.0, 578.8800048828125, 294.0, 582.0800170898438, 294.0, 591.0399780273438, 294.0, 592.9599609375, 294.9599914550781, 594.8800048828125, 296.8800048828125, 596.1599731445312, 298.79998779296875, 596.1599731445312, 307.91998291015625, 594.8800048828125, 309.8399963378906, 592.9599609375, 310.79998779296875, 578.8800048828125, 310.79998779296875, 576.9599609375, 312.7200012207031, 576.9599609375, 319.91998291015625, 575.0399780273438, 321.8399963378906, 571.2000122070312, 322.79998779296875, 564.1599731445312, 323.7599792480469, 555.2000122070312, 323.7599792480469, 553.2799682617188, 325.67999267578125, 552.0, 328.55999755859375, 552.0, 335.7599792480469, 551.3599853515625, 339.6000061035156, 550.0800170898438, 342.9599914550781, 548.1599731445312, 346.79998779296875, 546.239990234375, 349.67999267578125, 544.3200073242188, 352.55999755859375, 541.1199951171875, 356.8800048828125, 534.0800170898438, 363.6000061035156, 530.239990234375, 366.47998046875, 526.3999633789062, 368.3999938964844, 523.2000122070312, 369.8399963378906, 520.0, 370.79998779296875, 496.9599914550781, 370.79998779296875, 491.1999816894531, 369.8399963378906, 487.3599853515625, 368.3999938964844, 484.1600036621094, 367.44000244140625, 480.3199768066406, 365.5199890136719, 477.1199951171875, 363.6000061035156, 473.2799987792969, 360.7200012207031, 466.239990234375, 353.5199890136719, 464.3199768066406, 350.6399841308594, 462.3999938964844, 347.7599792480469, 461.1199951171875, 345.8399963378906, 460.47998046875, 342.9599914550781, 459.1999816894531, 339.6000061035156, 458.55999755859375, 336.7200012207031, 457.2799987792969, 333.8399963378906, 457.2799987792969, 331.91998291015625, 455.3599853515625, 330.0, 453.44000244140625, 331.91998291015625, 453.44000244140625, 333.8399963378906, 452.1600036621094, 335.7599792480469, 450.239990234375, 337.67999267578125, 448.3199768066406, 338.6399841308594, 423.3599853515625, 338.6399841308594, 422.0799865722656, 339.6000061035156, 418.239990234375, 340.55999755859375, 414.3999938964844, 340.55999755859375, 412.47998046875, 342.9599914550781, 412.47998046875, 344.8800048828125, 411.1999816894531, 346.79998779296875, 409.2799987792969, 344.8800048828125, 409.2799987792969, 342.9599914550781, 407.3599853515625, 340.55999755859375, 405.44000244140625, 339.6000061035156, 205.75999450683594, 339.6000061035156, 205.1199951171875, 338.6399841308594, 201.9199981689453, 337.67999267578125, 198.72000122070312, 336.7200012207031, 196.1599884033203, 336.7200012207031, 194.239990234375, 338.6399841308594, 192.95999145507812, 340.55999755859375, 192.95999145507812, 342.9599914550781, 191.67999267578125, 344.8800048828125, 189.75999450683594, 347.7599792480469, 187.83999633789062, 350.6399841308594, 185.9199981689453, 353.5199890136719, 184.0, 356.8800048828125, 180.8000030517578, 360.7200012207031, 176.95999145507812, 364.55999755859375, 173.75999450683594, 366.47998046875, 169.9199981689453, 368.3999938964844, 166.72000122070312, 369.8399963378906, 162.87998962402344, 370.79998779296875, 155.83999633789062, 371.7599792480469, 130.87998962402344, 371.7599792480469, 127.04000091552734, 370.79998779296875, 123.83999633789062, 369.8399963378906, 120.0, 367.44000244140625, 116.79999542236328, 365.5199890136719, 113.5999984741211, 363.6000061035156, 105.91999816894531, 355.91998291015625, 104.0, 352.55999755859375, 102.07999420166016, 349.67999267578125, 100.79999542236328, 347.7599792480469, 100.15999603271484, 344.8800048828125, 98.87999725341797, 341.5199890136719, 98.87999725341797, 338.6399841308594, 98.23999786376953, 336.7200012207031, 96.31999969482422, 334.79998779296875, 93.1199951171875, 334.79998779296875, 91.83999633789062, 335.7599792480469, 86.08000183105469, 336.7200012207031, 75.83999633789062, 336.7200012207031, 75.19999694824219, 337.67999267578125, 70.08000183105469, 338.6399841308594, 66.87999725341797, 338.6399841308594, 64.95999908447266, 336.7200012207031, 63.03999710083008, 335.7599792480469, 52.15999984741211, 335.7599792480469, 48.959999084472656, 334.79998779296875, 47.03999710083008, 333.8399963378906, 45.119998931884766, 331.91998291015625, 45.119998931884766, 330.0, 47.03999710083008, 327.6000061035156, 47.03999710083008, 325.67999267578125, 45.119998931884766, 323.7599792480469, 43.20000076293945, 322.79998779296875, 40.0, 322.79998779296875, 38.07999801635742, 321.8399963378906, 36.15999984741211, 319.91998291015625, 34.880001068115234, 317.03997802734375, 34.880001068115234, 309.8399963378906, 36.15999984741211, 307.91998291015625, 38.07999801635742, 306.0, 40.0, 305.03997802734375, 43.84000015258789, 304.0799865722656, 63.03999710083008, 304.0799865722656, 64.95999908447266, 303.1199951171875, 66.87999725341797, 301.1999816894531, 68.15999603271484, 298.79998779296875, 68.79999542236328, 295.91998291015625, 68.79999542236328, 293.0400085449219, 68.15999603271484, 292.0799865722656, 66.87999725341797, 289.1999816894531, 66.87999725341797, 278.1600036621094, 68.15999603271484, 274.79998779296875, 68.79999542236328, 272.8800048828125, 72.0, 270.0, 73.91999816894531, 269.0400085449219, 77.1199951171875, 268.0799865722656, 80.95999908447266, 268.0799865722656, 82.87999725341797, 266.1600036621094, 80.95999908447266, 262.79998779296875, 80.95999908447266, 260.8800048828125, 82.87999725341797, 258.9599914550781, 84.79999542236328, 258.0, 88.0, 258.0, 89.91999816894531, 257.0400085449219, 91.83999633789062, 255.1199951171875, 91.83999633789062, 254.1599884033203, 95.04000091552734, 249.83999633789062, 105.91999816894531, 238.79998779296875, 107.83999633789062, 236.87998962402344, 109.75999450683594, 234.95999145507812, 118.7199935913086, 225.83999633789062, 121.91999816894531, 223.9199981689453, 123.83999633789062, 222.95999145507812, 125.75999450683594, 222.95999145507812, 127.68000030517578, 222.0, 130.87998962402344, 220.0800018310547, 134.72000122070312, 216.72000122070312, 139.83999633789062, 212.87998962402344, 144.95999145507812, 208.0800018310547, 150.0800018310547, 203.75999450683594, 153.9199981689453, 200.87998962402344, 157.75999450683594, 198.0, 159.0399932861328, 198.0, 162.87998962402344, 195.1199951171875, 168.0, 189.83999633789062, 171.83999633789062, 186.95999145507812, 175.0399932861328, 186.0, 176.95999145507812, 184.0800018310547]]], 'labels': ['']}}
<PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=640x480>
Region to Segmentation
task_prompt = '<REGION_TO_SEGMENTATION>'text_input="<loc_702><loc_575><loc_866><loc_772>"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)draw_polygons(image, answer[task_prompt], fill_mask=True)Copied
Time taken: 653.99 ms{'<REGION_TO_SEGMENTATION>': {'polygons': [[[470.7200012207031, 288.239990234375, 473.91998291015625, 286.32000732421875, 477.1199951171875, 284.3999938964844, 479.03997802734375, 283.44000244140625, 480.9599914550781, 283.44000244140625, 484.1600036621094, 281.5199890136719, 486.7200012207031, 280.55999755859375, 489.91998291015625, 279.6000061035156, 493.7599792480469, 278.1600036621094, 500.79998779296875, 277.1999816894531, 511.03997802734375, 277.1999816894531, 514.8800048828125, 278.1600036621094, 518.0800170898438, 279.6000061035156, 520.6400146484375, 281.5199890136719, 522.5599975585938, 281.5199890136719, 524.47998046875, 283.44000244140625, 527.6799926757812, 284.3999938964844, 530.8800048828125, 286.32000732421875, 534.719970703125, 289.1999816894531, 543.0399780273438, 297.3599853515625, 544.9599609375, 300.239990234375, 546.8800048828125, 303.1199951171875, 548.7999877929688, 307.44000244140625, 550.0800170898438, 310.32000732421875, 550.719970703125, 313.1999816894531, 552.0, 317.03997802734375, 552.0, 334.32000732421875, 550.719970703125, 338.1600036621094, 550.0800170898438, 341.03997802734375, 548.7999877929688, 343.91998291015625, 546.8800048828125, 348.239990234375, 544.9599609375, 351.1199951171875, 543.0399780273438, 354.0, 532.7999877929688, 364.0799865722656, 529.5999755859375, 366.0, 527.6799926757812, 366.9599914550781, 524.47998046875, 367.91998291015625, 521.9199829101562, 368.8800048828125, 518.0800170898438, 369.8399963378906, 496.9599914550781, 369.8399963378906, 489.91998291015625, 368.8800048828125, 486.7200012207031, 367.91998291015625, 484.1600036621094, 366.9599914550781, 480.9599914550781, 366.0, 479.03997802734375, 365.03997802734375, 475.8399963378906, 363.1199951171875, 472.0, 360.239990234375, 466.8799743652344, 354.9599914550781, 463.67999267578125, 351.1199951171875, 461.7599792480469, 348.239990234375, 459.8399963378906, 343.91998291015625, 458.55999755859375, 341.03997802734375, 457.91998291015625, 338.1600036621094, 456.6399841308594, 335.2799987792969, 456.0, 330.9599914550781, 454.7200012207031, 326.1600036621094, 454.7200012207031, 318.9599914550781, 456.0, 313.1999816894531, 456.6399841308594, 309.3599853515625, 457.91998291015625, 306.47998046875, 458.55999755859375, 303.1199951171875, 461.7599792480469, 297.3599853515625, 463.67999267578125, 294.47998046875]]], 'labels': ['']}}
<PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=640x480>
Open vocabulary detection
task_prompt = '<OPEN_VOCABULARY_DETECTION>'text_input="a green car"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)bbox_results = convert_to_od_format(answer[task_prompt])plot_bbox(image, bbox_results)Copied
Time taken: 138.76 ms{'<OPEN_VOCABULARY_DETECTION>': {'bboxes': [[34.880001068115234, 158.63999938964844, 582.0800170898438, 374.1600036621094]], 'bboxes_labels': ['a green car'], 'polygons': [], 'polygons_labels': []}}
<Figure size 640x480 with 1 Axes>
Region to category
task_prompt = '<REGION_TO_CATEGORY>'text_input="<loc_52><loc_332><loc_932><loc_774>"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)Copied
Time taken: 130.24 ms{'<REGION_TO_CATEGORY>': 'car<loc_52><loc_332><loc_932><loc_774>'}
Region to description
task_prompt = '<REGION_TO_DESCRIPTION>'text_input="<loc_52><loc_332><loc_932><loc_774>"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)Copied
Time taken: 149.88 ms{'<REGION_TO_DESCRIPTION>': 'mint green Volkswagen Beetle<loc_52><loc_332><loc_932><loc_774>'}
OCR Tasks
We use a new image
url = "http://ecx.images-amazon.com/images/I/51UUzBDAMsL.jpg?download=true"image = Image.open(requests.get(url, stream=True).raw).convert('RGB')imageCopied
<PIL.Image.Image image mode=RGB size=403x500>
OCR
task_prompt = '<OCR>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)Copied
Time taken: 231.77 ms{'<OCR>': 'CUDAFOR ENGINEERSAn Introduction to High-PerformanceParallel ComputingDUANE STORTIMETE YURTOGLU'}
OCR with region
task_prompt = '<OCR_WITH_REGION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)draw_ocr_bboxes(image, answer[task_prompt])Copied
Time taken: 425.63 ms{'<OCR_WITH_REGION>': {'quad_boxes': [[167.0435028076172, 50.25, 374.9914855957031, 50.25, 374.9914855957031, 114.25, 167.0435028076172, 114.25], [144.8784942626953, 120.75, 374.9914855957031, 120.75, 374.9914855957031, 148.75, 144.8784942626953, 148.75], [115.86249542236328, 165.25, 376.20050048828125, 165.25, 376.20050048828125, 183.75, 115.86249542236328, 182.75], [239.9864959716797, 184.75, 376.20050048828125, 185.75, 376.20050048828125, 202.75, 239.9864959716797, 201.75], [266.1814880371094, 440.75, 376.20050048828125, 440.75, 376.20050048828125, 455.75, 266.1814880371094, 455.75], [251.67349243164062, 459.75, 376.20050048828125, 459.75, 376.20050048828125, 474.25, 251.67349243164062, 474.25]], 'labels': ['</s>CUDA', 'FOR ENGINEERS', 'An Introduction to High-Performance', 'Parallel Computing', 'DUANE STORTI', 'METE YURTOGLU']}}
<PIL.Image.Image image mode=RGB size=403x500>
Usage of Florence-2 Base Fine Tuning
We create the model and the processor
model_id = 'microsoft/Florence-2-base-ft'model = AutoModelForCausalLM.from_pretrained(model_id, trust_remote_code=True).eval().to('cuda')processor = AutoProcessor.from_pretrained(model_id, trust_remote_code=True)Copied
We get the car image again
url = "https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/transformers/tasks/car.jpg?download=true"image = Image.open(requests.get(url, stream=True).raw)imageCopied
<PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=640x480>
Tasks without additional prompts
Caption
task_prompt = '<CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")answerCopied
Time taken: 176.65 ms
{'<CAPTION>': 'A green car parked in front of a yellow building.'}
task_prompt = '<DETAILED_CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")answerCopied
Time taken: 246.26 ms
{'<DETAILED_CAPTION>': 'In this image we can see a car on the road. In the background there is a wall with doors. At the top of the image there is sky.'}
task_prompt = '<MORE_DETAILED_CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")answerCopied
Time taken: 259.87 ms
{'<MORE_DETAILED_CAPTION>': 'There is a light green car parked in front of a yellow building. There are two brown doors on the building behind the car. There is a brick sidewalk under the car on the ground. '}
Region Proposal
It is object detection, but in this case it does not return the classes of the objects.
task_prompt = '<REGION_PROPOSAL>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 120.69 ms{'<REGION_PROPOSAL>': {'bboxes': [[34.880001068115234, 160.55999755859375, 598.0800170898438, 371.2799987792969]], 'labels': ['']}}
<Figure size 640x480 with 1 Axes>
Object detection
In this case it does return the classes of the objects
task_prompt = '<OD>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 199.46 ms{'<OD>': {'bboxes': [[34.880001068115234, 160.55999755859375, 598.0800170898438, 371.7599792480469], [454.7200012207031, 96.72000122070312, 581.4400024414062, 262.32000732421875], [453.44000244140625, 276.7200012207031, 554.5599975585938, 370.79998779296875], [93.1199951171875, 280.55999755859375, 197.44000244140625, 371.2799987792969]], 'labels': ['car', 'door', 'wheel', 'wheel']}}
<Figure size 640x480 with 1 Axes>
Dense region caption
task_prompt = '<DENSE_REGION_CAPTION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 210.33 ms{'<DENSE_REGION_CAPTION>': {'bboxes': [[35.52000045776367, 160.55999755859375, 598.0800170898438, 371.2799987792969], [454.0799865722656, 276.7200012207031, 553.9199829101562, 370.79998779296875], [94.4000015258789, 280.55999755859375, 196.1599884033203, 371.2799987792969]], 'labels': ['turquoise volkswagen beetle', 'wheel', 'wheel']}}
<Figure size 640x480 with 1 Axes>
Tasks with additional prompts
Phrase Grounding
task_prompt = '<CAPTION_TO_PHRASE_GROUNDING>'text_input="A green car parked in front of a yellow building."t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)plot_bbox(image, answer[task_prompt])Copied
Time taken: 168.37 ms{'<CAPTION_TO_PHRASE_GROUNDING>': {'bboxes': [[34.880001068115234, 159.1199951171875, 598.0800170898438, 375.1199951171875], [0.3199999928474426, 0.23999999463558197, 639.0399780273438, 304.0799865722656]], 'labels': ['A green car', 'a yellow building']}}
<Figure size 640x480 with 1 Axes>
Referring expression segmentation
task_prompt = '<REFERRING_EXPRESSION_SEGMENTATION>'text_input="a green car"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)draw_polygons(image, answer[task_prompt], fill_mask=True)Copied
Time taken: 395.38 ms{'<REFERRING_EXPRESSION_SEGMENTATION>': {'polygons': [[[180.8000030517578, 179.27999877929688, 237.75999450683594, 163.44000244140625, 333.1199951171875, 162.47999572753906, 374.7200012207031, 172.55999755859375, 407.3599853515625, 219.59999084472656, 477.7599792480469, 223.9199981689453, 540.47998046875, 248.87998962402344, 576.3200073242188, 264.7200012207031, 576.3200073242188, 292.55999755859375, 598.719970703125, 292.55999755859375, 598.719970703125, 311.7599792480469, 577.5999755859375, 311.7599792480469, 577.5999755859375, 321.8399963378906, 553.9199829101562, 325.1999816894531, 546.239990234375, 355.44000244140625, 523.8399658203125, 371.2799987792969, 477.7599792480469, 367.91998291015625, 456.6399841308594, 342.0, 452.1600036621094, 338.6399841308594, 201.27999877929688, 338.6399841308594, 187.83999633789062, 358.79998779296875, 162.87998962402344, 371.2799987792969, 121.27999877929688, 371.2799987792969, 98.87999725341797, 348.7200012207031, 94.4000015258789, 331.91998291015625, 66.23999786376953, 338.6399841308594, 39.36000061035156, 331.91998291015625, 47.03999710083008, 325.1999816894531, 34.880001068115234, 321.8399963378906, 34.880001068115234, 305.03997802734375, 66.23999786376953, 299.2799987792969, 67.5199966430664, 269.0400085449219, 82.87999725341797, 269.0400085449219, 82.87999725341797, 258.9599914550781, 120.0, 222.95999145507812]]], 'labels': ['']}}
<PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=640x480>
Region to Segmentation
task_prompt = '<REGION_TO_SEGMENTATION>'text_input="<loc_702><loc_575><loc_866><loc_772>"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)draw_polygons(image, answer[task_prompt], fill_mask=True)Copied
Time taken: 279.46 ms{'<REGION_TO_SEGMENTATION>': {'polygons': [[[464.3199768066406, 292.0799865722656, 482.239990234375, 280.55999755859375, 504.0, 276.239990234375, 521.9199829101562, 280.55999755859375, 539.8399658203125, 292.0799865722656, 551.3599853515625, 308.8800048828125, 555.8399658203125, 325.67999267578125, 551.3599853515625, 341.5199890136719, 546.8800048828125, 354.9599914550781, 537.9199829101562, 365.03997802734375, 521.9199829101562, 371.7599792480469, 499.5199890136719, 371.7599792480469, 483.5199890136719, 368.3999938964844, 470.0799865722656, 361.67999267578125, 461.1199951171875, 351.6000061035156, 456.6399841308594, 339.1199951171875, 449.5999755859375, 332.3999938964844, 454.0799865722656, 318.9599914550781, 456.6399841308594, 305.5199890136719]]], 'labels': ['']}}
<PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=640x480>
Open vocabulary detection
task_prompt = '<OPEN_VOCABULARY_DETECTION>'text_input="a green car"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)bbox_results = convert_to_od_format(answer[task_prompt])plot_bbox(image, bbox_results)Copied
Time taken: 134.53 ms{'<OPEN_VOCABULARY_DETECTION>': {'bboxes': [[34.880001068115234, 159.1199951171875, 597.4400024414062, 374.6399841308594]], 'bboxes_labels': ['a green car'], 'polygons': [], 'polygons_labels': []}}
<Figure size 640x480 with 1 Axes>
Region to category
task_prompt = '<REGION_TO_CATEGORY>'text_input="<loc_52><loc_332><loc_932><loc_774>"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)Copied
Time taken: 131.88 ms{'<REGION_TO_CATEGORY>': 'car<loc_52><loc_332><loc_932><loc_774>'}
Region to description
task_prompt = '<REGION_TO_DESCRIPTION>'text_input="<loc_52><loc_332><loc_932><loc_774>"t0 = time.time()answer = generate_answer(task_prompt, text_input)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)Copied
Time taken: 136.35 ms{'<REGION_TO_DESCRIPTION>': 'car<loc_52><loc_332><loc_932><loc_774>'}
OCR Tasks
We use a new image
url = "http://ecx.images-amazon.com/images/I/51UUzBDAMsL.jpg?download=true"image = Image.open(requests.get(url, stream=True).raw).convert('RGB')imageCopied
<PIL.Image.Image image mode=RGB size=403x500>
OCR
task_prompt = '<OCR>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)Copied
Time taken: 227.62 ms{'<OCR>': 'CUDAFOR ENGINEERSAn Introduction to High-PerformanceParallel ComputingDUANE STORYIMETE YURTOGLU'}
OCR with region
task_prompt = '<OCR_WITH_REGION>'t0 = time.time()answer = generate_answer(task_prompt)t1 = time.time()print(f"Time taken: {(t1-t0)*1000:.2f} ms")print(answer)draw_ocr_bboxes(image, answer[task_prompt])Copied
Time taken: 428.51 ms{'<OCR_WITH_REGION>': {'quad_boxes': [[167.44650268554688, 50.25, 374.9914855957031, 50.25, 374.9914855957031, 114.25, 167.44650268554688, 114.25], [144.8784942626953, 121.25, 374.9914855957031, 120.75, 374.9914855957031, 148.75, 144.8784942626953, 149.25], [115.4594955444336, 165.75, 376.6034851074219, 165.75, 376.6034851074219, 183.75, 115.4594955444336, 183.75], [239.9864959716797, 184.75, 376.6034851074219, 185.75, 376.6034851074219, 203.75, 239.9864959716797, 202.25], [266.1814880371094, 441.25, 376.20050048828125, 441.25, 376.20050048828125, 456.25, 266.1814880371094, 456.25], [251.67349243164062, 459.75, 376.20050048828125, 459.75, 376.20050048828125, 474.75, 251.67349243164062, 474.75]], 'labels': ['</s>CUDA', 'FOR ENGINEERS', 'An Introduction to High-Performance', 'Parallel Computing', 'DUANE STORYI', 'METE YURTOGLU']}}
<PIL.Image.Image image mode=RGB size=403x500>